
Robotul portal constă dintr-un cadru de coloană, componentă pe axa X, componentă pe axa Y, componentă pe axa Z, dispozitiv de fixare și cutie de control.
Este un echipament industrial complet automat bazat pe sistemul de coordonate tridimensional dreptunghiular X, Y, Z, care poate ajusta poziția piesei de prelucrat sau poate realiza mișcarea traiectoriei piesei de prelucrat. Miezul său de control este implementat prin controlere industriale.
Controlerul analizează și procesează diverse semnale de intrare, emite judecăți logice, apoi emite comenzi de execuție către fiecare componentă de ieșire pentru a finaliza mișcarea comună între axele X, Y și Z și pentru a realiza un set complet de procese de operare complet automate.
Este utilizat în asamblarea și transportul produselor, în sistemele de transport și în șantierele de lucru fără echipaj. Poate fi folosit ca un echipament periferic important pentru depozitare temporară și logistică și poate fi adaptat în mod flexibil cu echipamentul gazdă pentru o utilizare ușoară. Aplicații Industrii implicate în: asamblarea finală, sub-asamblarea, prelucrarea, testarea, depanarea și transportul produselor și așa mai departe.
Caracteristicile produsului sunt de a ajuta clienții să rezolve problemele de eficiență scăzută sau riscuri ridicate de manipulare în diferite tipuri de manipulare a materialelor, astfel încât să reducă convenabil și rapid riscurile de manipulare, să economisească timp, efort, să economisească forța de muncă și chiar să înlocuiască forța de muncă.
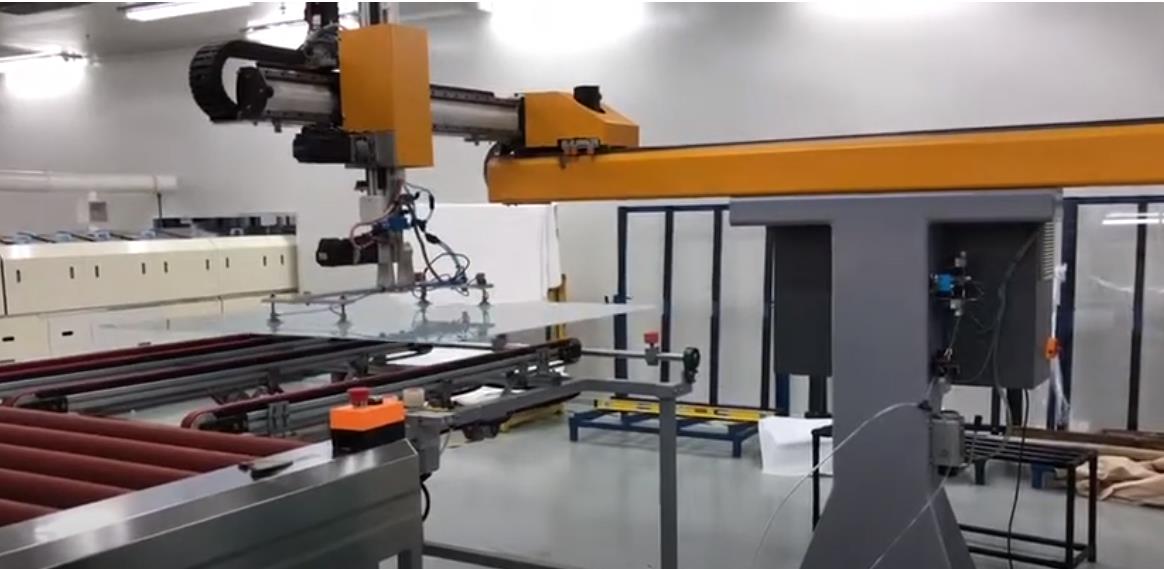
 Acest dispozitiv de manipulare pentru sticlă, manipulator de ferme de tip portal include stâlpi și grinzi transversale instalate pe stâlpi. Grinzile transversale sunt instalate cu șine glisante. Șinele de glisare sunt instalate cu un dispozitiv de glisare transversal. Dispozitivul de alunecare transversală este instalat cu un dispozitiv de alunecare verticală și un dispozitiv pneumatic de ventuză. Se poate realiza Mecanismul de transport se mișcă într-un punct fix în spațiul tridimensional, aspiră sticla prin ventuză, se mișcă mai întâi lateral pe axa X, apoi se întoarce cu 90 de grade în poziția desemnată și apoi se deplasează în sus și în jos pe axa Y. După ce ați ajuns în poziția stabilită, eliberați sticla și așezați-o pe raftul de sticlă. Stabilitatea structurală a întregului dispozitiv este foarte mare, ceea ce îmbunătățește foarte mult manevrarea. eficienţă.
Acest dispozitiv de manipulare pentru sticlă, manipulator de ferme de tip portal include stâlpi și grinzi transversale instalate pe stâlpi. Grinzile transversale sunt instalate cu șine glisante. Șinele de glisare sunt instalate cu un dispozitiv de glisare transversal. Dispozitivul de alunecare transversală este instalat cu un dispozitiv de alunecare verticală și un dispozitiv pneumatic de ventuză. Se poate realiza Mecanismul de transport se mișcă într-un punct fix în spațiul tridimensional, aspiră sticla prin ventuză, se mișcă mai întâi lateral pe axa X, apoi se întoarce cu 90 de grade în poziția desemnată și apoi se deplasează în sus și în jos pe axa Y. După ce ați ajuns în poziția stabilită, eliberați sticla și așezați-o pe raftul de sticlă. Stabilitatea structurală a întregului dispozitiv este foarte mare, ceea ce îmbunătățește foarte mult manevrarea. eficienţă.

Ora postării: 18-mar-2024



